


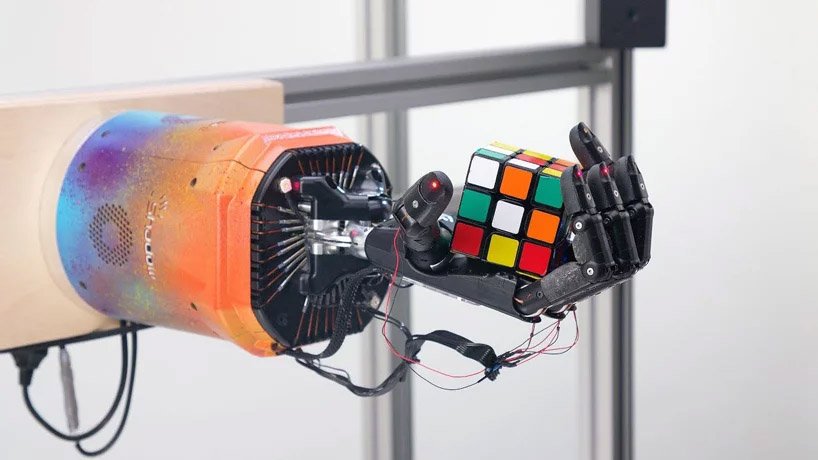
Los investigadores de OpenAI han desarrollado un brazo robótico que utiliza inteligencia artificial para resolver el cubo de Rubik con una sola mano.
El robot extremadamente diestro presenta un diseño de 24 articulaciones con forma de mano humana y solo tardó cuatro minutos en completar la tarea.
openAI ha usado una simulación por ordenador para enseñarle al robot, denominado «dactyl», cómo resolver el cubo, ejecutando rutinas que tomarían 13.000 años en completarse. sensores visuales y un algoritmo de resolución de cubos le dieron a la IA instrucciones sobre qué movimientos hacer.
El mayor desafío que enfrentamos fue crear entornos en simulación lo suficientemente diversos como para capturar la física del mundo real»
factores como la fricción, la elasticidad y la dinámica son increíblemente difíciles de medir y modelar para objetos tan complejos como los cubos de rubik o las manos robóticas y descubrimos que la aleatorización de dominios por sí sola no es suficiente».
Ashley Pilipiszyn, director técnico de openAI
Para superar esto, OpenAI ha desarrollado un nuevo método llamado aleatorización automática de dominios (adr), que genera interminablemente entornos progresivamente más difíciles en la simulación.
Por consiguiente, esto libera de tener un modelo preciso del mundo real y permite que la transferencia de redes neuronales aprendidas en la simulación se aplique al mundo real.
Así pues, OpenAI espera que su IA desarrollada pueda usarse para controlar las manos de los robots en una variedad de tareas de propósito general.




